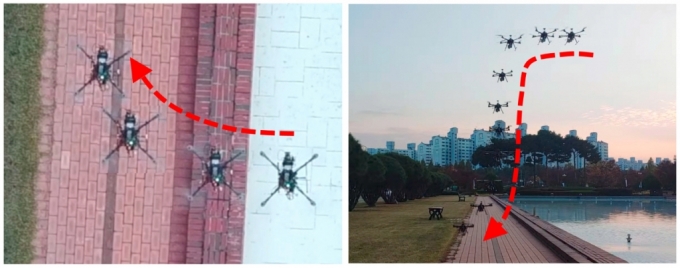
 연구팀이 개발한 드론이 GIST 행정동 앞 연못 근처에서 자동으로 물을 피해 안전한 장소로 착륙하는 모습. /사진=GIST
연구팀이 개발한 드론이 GIST 행정동 앞 연못 근처에서 자동으로 물을 피해 안전한 장소로 착륙하는 모습. /사진=GISTGIST(광주과학기술원)는 이종호 기계공학부 연구팀이 카메라로 촬영한 이미지 정보와 라이다 센서로 측정한 거리 정보를 활용해 드론이 스스로 안전한 장소를 찾아 자동으로 착륙하는 드론 기술을 개발했다고 21일 밝혔다. 연구 결과는 국제 학술지 'IEEE/ASME 메카트로닉스 변환'에 지난 13일 온라인 게재됐다.
연구팀은 시각 정보를 제공하는 카메라 센서와 거리 측정을 통해 지형 정보를 제공하는 라이다 센서 등 2개 센서를 동시에 활용했다. 이를 통해 다양하고 신뢰도 높은 환경 정보를 얻을 수 있었다고 설명했다.
연구팀은 카메라로 촬영한 이미지 정보와 라이다 센서로 측정한 거리 정보를 활용했다. 먼저 카메라로 촬영한 이미지로 딥러닝 기술을 활용해 도로, 잔디, 물 등 착륙할 수 있는 지역과 착륙할 수 없는 지역을 구분한다. 드론이 기울어진 지면에 착륙할 경우 넘어질 수 있기 때문에 거리를 측정하는 라이다 센서를 부착했다. 이를 통해 지면의 높낮이와 기울기를 계산해 착륙 시 넘어지지 않는 평평한 지면을 찾을 수 있다.
연구팀은 나무와 잔디, 물, 언덕이 있는 자연환경뿐만 아니라 도심 속 장애물이 있는 건물 옥상, 덤불, 연못, 경사진 장소 등지에서의 실험을 통해 드론이 스스로 안전하게 착륙하는 것을 확인했다고 밝혔다.
연구를 이끈 이 교수는 "이번 연구 성과를 활용하면 주위 환경에 대한 사전 정보가 없어도 드론과 같은 무인항공기의 안전한 착륙이 가능하다"며 "국방 및 치안 등 다양한 응용 분야에서 활용될 것으로 기대한다"고 말했다.
이번 연구는 GIST-MIT 연구 협력 및 문화체육관광부, 한국콘텐츠진흥원의 문화기술 연구개발 사업의 지원을 받았다.
이 시각 인기 뉴스
 연구를 위해 제작된 드론과 드론의 구성품에 대한 설명. /사진=GIST
연구를 위해 제작된 드론과 드론의 구성품에 대한 설명. /사진=GIST