[영상]韓로봇, 코끼리 코처럼 물체 '착'…바늘구멍 실꿰기도 성공
머니투데이 김인한 기자
2022.10.20 14:14
한국기계연구원, 흡착·집게형 그리퍼 로봇 개발
 한국기계연구원이 개발한 그리퍼 로봇이 바늘구멍에 물체를 넣는 초정밀 기술을 구현한 모습. / 영상=한국기계연구원
한국기계연구원이 개발한 그리퍼 로봇이 바늘구멍에 물체를 넣는 초정밀 기술을 구현한 모습. / 영상=한국기계연구원국내 연구진이 코끼리 코처럼 물체를 잡는 '그리퍼 로봇'을 개발했다. 그리퍼 로봇은 물체를 쥐어 옮기거나 각종 동작을 수행할 수 있는 로봇이다. 이 기술은 향후 생활 속 서비스 로봇이나 산업 분야에 적용할 수 있을 것으로 보인다.
한국기계연구원은 20일 '흡착·집게형 그리퍼 로봇'을 개발했다고 밝혔다. 이 로봇은 복잡한 기계장치나 센서 없이도 구동하며 잡은 물체를 파손 없이 이동시킬 수 있다. 특히 바늘구멍에 얇은 물체를 통과시키거나 촛불에 불을 붙일 수 있을 정도로 초정밀 기술을 구현했다.
그간 그리퍼 로봇은 흡착·집게형으로 나눠 개발되면서 각 기술에 대한 한계 보완이 쉽지 않았다. 흡착형 로봇은 바늘이나 실처럼 얇은 물체를 잡아 원하는 동작을 수행하기 어렵고, 집게형은 집게보다 물체가 클 경우 움켜잡기 어려운 한계가 있었다.
 한국기계연구원이 개발한 로봇이 촛불에 불을 붙이고 있는 모습. / 영상=한국기계연구원
한국기계연구원이 개발한 로봇이 촛불에 불을 붙이고 있는 모습. / 영상=한국기계연구원하지만 기계연 로봇메카트로닉스연구실은 유연 구조체로 흡착·집게형 로봇을 하나로 구현했다. 유연 구조체 안에는 진공을 만드는 미세 유로(유체가 흐르는 길)가 있어 물체를 흡착할 수 있다. 특히 미세 유로는 유연해 물체 형상에 맞춰 밀착되는 장점을 지닌다. 흡착뿐만 아니라 집게용으로도 쓸 수 있다. 구조체 중앙에 있는 변형 와이어를 잡아당기면, 구조체가 반으로 접혀 물체를 오므려 잡을 수 있다.
실제로 로봇을 통해 자체 크기보다 100분의 1작은 침(직경 0.25㎜)을 바닥에서 집어 올리거나, 10배 크기인 박스를 흡착해 들어 올렸다. 또 복잡한 센서나 제어 없이, 변형 와이어를 움직이는 공압 실린더 동작으로 집게처럼 오므려 잡는 기능을 보여줬다.
송성혁 기계연 선임연구원은 "집게·흡착형 그리퍼는 말랑말랑해 사람과 함께 작업하는 과정에서도 부상의 위험이 없을 뿐 아니라, 복잡한 기계구조나 센서 없이도 다양한 크기의 물체를 다룰 수 있다"며 "일상생활 속 서비스 로봇이나 다양한 산업 분야에 응용할 수 있을 것으로 기대한다"고 말했다.
 사람이 잡기 어려운 바늘을 로봇이 흡착하는 모습. / 영상=한국기계연구원
사람이 잡기 어려운 바늘을 로봇이 흡착하는 모습. / 영상=한국기계연구원 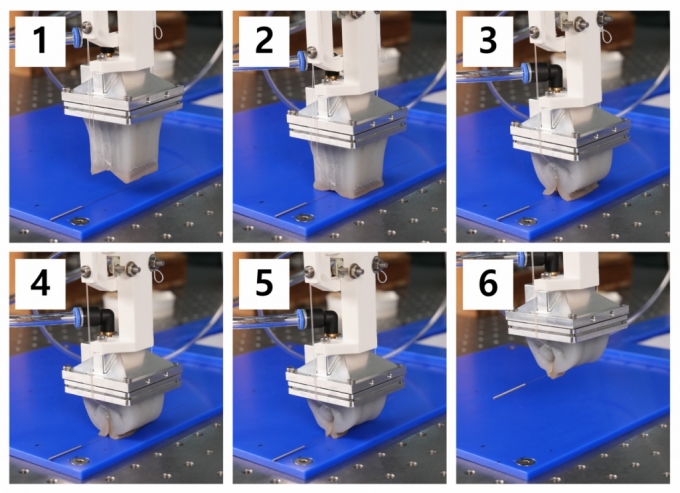 한국기계연구원이 개발한 그리퍼 로봇이 얇은 바늘을 들어올리는 모습. / 사진=한국기계연구원
한국기계연구원이 개발한 그리퍼 로봇이 얇은 바늘을 들어올리는 모습. / 사진=한국기계연구원
<저작권자 @머니투데이, 무단전재 및 재배포 금지>