 김석균 한밭대 창의융합학과 교수/사진제공=한밭대
김석균 한밭대 창의융합학과 교수/사진제공=한밭대김 교수팀은 전류 센서를 가속도 추정 알고리즘으로 대체하고 피드백 루프 지능화 기술을 탑재한 능동형 영-극점 상쇄 속도 동기화 제어기술을 개발했다.
센서에는 서보모터 운동 방정식을 활용한 전류 추정 기술(Luenberger Observer)이 존재한다. 이는 널리 활용되고 있으나 이상적인 성능을 보장하기 위해서는 이득 데이터베이스와 검색 과정이 필요하다. 추가적인 인력과 시간, 프로세서 연산량이 요구되는 것이다.
연구팀은 고성능 속도 동기화 성능을 위해 필요한 높은 폐쇄루프가 상대적 안정도를 떨어뜨리는 단점을 해결하기 위해 1차 미분 방정식을 풀어 폐쇄루프 이득을 가변하는 지능형 기술을 개발했다. 고성능과 상대 안정도라는 두 마리 토끼를 모두 잡았다.
아울러 능동 댐핑 기술을 도입하고 내부 가속도 폐쇄루프 이득 구조를 비선형화해 영-극점 상쇄를 유발, 불필요한 오버 및 언더슈트 현상을 제거했다. 고성능을 보장하면서 성능 튜닝과정의 복잡도를 낮춘 셈이다.
이 시각 인기 뉴스
김 교수는 "이번 연구를 위해 NI社의 myRIO1900 프로세서와 Quenser社의 Qube-servo2 모터 3세트를 활용해 속도 동기화 실험 하드웨어를 구축했다"며 "LabVIEW와 MATLAB을 활용해 제어 및 추정 기술을 개발했다. 이는 기존의 기술과 비교해 성능 우위를 보였다"고 설명했다.
한편 이번 연구는 과기부의 '개인기초연구사업'과 교육부의 '중점연구소사업' 지원으로 수행됐다.
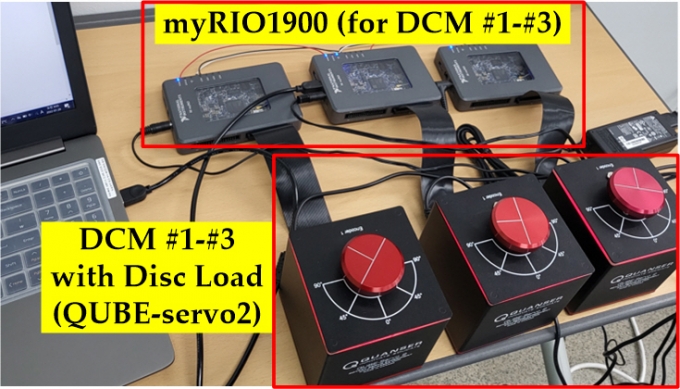 김석균 한밭대 교수 연구팀의 실험 장비./사진제공=한밭대
김석균 한밭대 교수 연구팀의 실험 장비./사진제공=한밭대